







最新ゲームが毎日大量にリリースされる昨今。メーカーやストアのゲーム紹介だけでは「どんなゲームかわからない!」とお嘆きのGame*Spark読者も多いのではないでしょうか。そこで“なるべく早く”ゲームの生の内容をお届けするのが本企画「爆速プレイレポ」となります。
今回は開発をPyramid Gamesが、パブリッシャーをPlayWayとPyramid Gamesが担当し、2020年11月13日にSteamにてPC向けにリリースした『Rover Mechanic Simulator』について生の内容をお届けしたいと思います。
『Rover Mechanic Simulator』とは?

本作はもともと2020年1月より早期アクセスが実施されており、今回は正式版のリリースとなります。タイトルを読んで字がごとく、本作においてプレイヤーは惑星探査車「ローバー」の整備士となって次々と運ばれてくるローバーの点検修理を行います。
宇宙……その響きのなんと雄大なこと。古来より宙に魅せられた多くの人々が全身全霊で挑んでもなおその全貌を見ることができない事実に大変なロマンを感じます。
2020年11月16日には、日本人宇宙飛行士が民間企業制作の新型宇宙船「クルードラゴン」に乗り込み、国際宇宙ステーションに向かうという一大イベント(詳細はJAXAの特設ページにて)が実施。打ち上げは無事成功し、記事公開時点現在は国際宇宙ステーションへ向かっている最中です。
Liftoff! pic.twitter.com/Unf1ScdVFB
— SpaceX (@SpaceX) November 16, 2020
また宇宙関連でよく耳にするのは火星。ローバーが撮影した火星地表面の写真を見たことがある、という方も多いと存じます。僕も以前アメリカはケネディ宇宙センターにおいて展示物を見たことがあり、それはそれはもう感動したものです。
ともあれ本作では実在のローバーが登場。今は宇宙の彼方にいるマシンが最新のグラフィックによって再現され、しかもネジ一本に至るまで触ることができるとは良い時代になったものです。早速やってまいりましょう。
本編開始

プロフィールを作成して本編開始。

目が覚めるとプレイヤーはとある施設の扉前に立っていました。基本的な操作はWASDで移動、マウスで視点操作とアクションを行うことができます。

おお……外を見るとここは火星基地であることがわかります。いいですねえ……いや、い”い”ですねぇ……むき出しの地面が、岩が、埃っぽい大気が、身を捩るようにスタンバイするマシンたちが既に最高の舞台装置です。開始5秒でこの興奮ぶり、先ほどの扉を開けたら一体どうなってしまうのか。

アッ!扉がしゅっと開いt……ひっ……なんて素敵な内装がひろgあっあっあっ

ほぁぁ……(感嘆のため息)
これですよ……白を基調とした部屋に黒のフレームを添えてアクセントに赤を入れることで全体をギュッと引き締める画づくり……最高です。
整備道具の確認


冷静になったところで室内を見回すと、画面右上に表示された目標に対応した緑色のダイヤマークがあちこちに点在していることが分かります。ここからはチュートリアルということで、このダイヤに従って順に確認していきましょう。

道具棚に置いてあるラジオは5種類のジャンルを切り替えて音楽を流すことができます。さらにローカルフォルダ内に音楽ファイルを置くことで、自分の好きな曲をかけることも可能。僕は「宇宙で流す音楽はクラシックである」原理主義者なので、今回はクラシックジャンルを設定。
あ、よく見ると下段にMRE(レーション)が転がっています。これ昔、友人から業務中の非常食として頂いたことがあるのですが、結局食べずじまいでした。今考えれば、あれ在庫処分として僕に押し付けた気が……。

閑話休題。どんどんいきましょう。こちらはPCB Table。電子部品の調子が悪いときは、ここで内部のプリント基板を調べてダメージの有無を確認することができます。

そしてこっちが Rover ECU Configurator。この電子制御ユニットで、ローバー側のシステムを整えてリスタートさせます。この使い方については後でまた詳しく書きます。

これはMCU、メインコントロールユニットですね。ここで室内の作業用クレーンを操作したり、息抜きにゲームなんかも遊ぶことができます。解説文をよく見ると「火星にsudo コマンドはねえ」とあるのですが、このMCUもしかしてUnix系のOS積んでる……?

その隣には最近お馴染みになりつつある3Dプリンターが置かれています。パーツを新品交換する際はここでリソースを使うことで、新しくプリントすることが可能です。

交換した古いパーツ、ダメージが蓄積してもう使えないような部品はこちらのCrusherに放り込んでリサイクルしましょう。

またこちらのWorkbenchでは機材のコンポーネントセットのダメージ有無を確認したり、汚れたパーツの掃除を行うことができます。
依頼をこなそう

Fキーを押すと手元のタブレットを開いて、整備依頼を確認することができます。今回はチュートリアルなので簡単、ローバーが装備しているタイヤのいずれかが不調なので特定/交換してほしいとのこと。さっそく受けていきましょう。

ローバーを作業ペースに移動させるため、MCUからクレーンを操作します。見覚えのある画面配置に、どこかで見たことのあるペンギンが宇宙服のヘルメットを抱えています。貴様Li〇uxだな?



クレーンを起動すると視点が操作画面に移り、このようにWASDとShiftキーを組み合わせた操作でトレーラーの荷台を掴んで移動させます。

さていま、目の前に鎮座ましましているのはローバー「Sojourner」です。たぶん航空宇宙ファンは過呼吸起こすんじゃないでしょうか。詳細はNASAのウェブサイトで確認いただくとして、これは1997年7月4日に初めて火星に降りたNASAのローバーで、そこから約3か月ほど地表の調査ミッションを行いました。そんな偉大なる先輩と言っても過言ではないローバーの足回りが不調であるとは一大事。原因を特定してよろしく処置せねばなりません。

作業は3つのモードを使い分けて進めていきます。ローバーを組み立てる「Assembly Mode」、反対に分解する「Disassembly Mode」そして各部のダメージ状況を分析する「Analytics Mode」です。

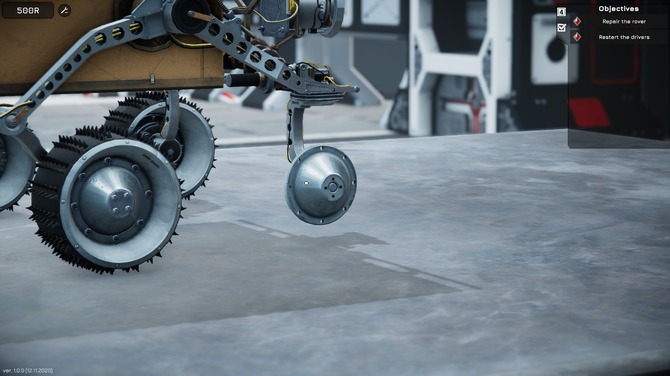
まずは「Analytics Mode」でマシンを外からチェック。画像のように真っ白な部分はまだ分析を行っていないという意味ですね。

マウスでパーツをそれぞれクリックすると視点がズームインされ、右クリック長押しで分析することで残り耐久度を三段階に色分けして表示させることができます。

ダメージが溜まり耐久度が減るにつれて色は緑から黄、そして赤に変化します。画像では前左側のホイールが真っ赤。この部品を取り換える必要があります。

「Disassembly Mode」に切り替えて、マウスクリックと長押しでネジ一本から分解していきます。ここの操作感は、パーツがするする簡単に外れてくれるため単体であれば楽なのですが、これが全タイヤ全部品をつけたり外したりする場合は、一転して忍耐の心を試されるかもしれないと感じました。ところで本当に話題が明後日の方向へ飛んでしまうのですが、このタイヤ形状見るたびに往年のミニ四駆シリーズを思い出します。
外れました。

次は3Dプリンターで新しくパーツを作りましょう。

プリントされたパーツはカプセルに入った状態で取り出し口からコロンと出てきます。個人的に、このカプセルを取るときの効果音が大好きです。

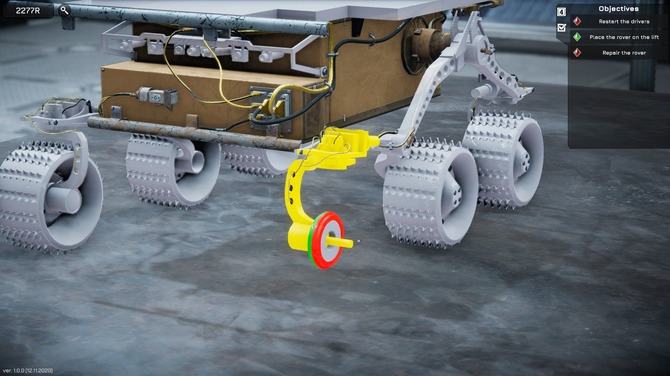
「Assembly Mode」に切り替え部品を取り付け……、

ネジもきっちり締め直して交換完了です。

まだ作業は続きます。ここからREC Connectorという受信機を取り付け、Rover ECU Configuratorからローバーのシステムを整えていきます。

Rover ECU Configuratorにアクセスすると視点が切り替わり、回路図のようなパズル画面に移りました。

ここでは電圧を調整しつつパネルを配置して電流のパスをつなぐ必要があります。

成功。早い話が『バイオショック』のハッキングパズルスタイルですね。

これですべての作業が終わりました。


タブレットでオーダー完了ボタンをタッチして、報酬と経験値を貰います。意外とガッツリとしたチュートリアルでしたね。

ちなみにこの次のオーダーでは、先ほど直した足回り、今度は「内部のベアリングが調子悪いから直して」と依頼が来ました。
一回目のオーダーでまとめて言ってくれ!!!
おわりに

早期アクセスから順調にアップデートが繰り返されてきただけあって、本作のシミュレーションゲームとしての完成度はとても高いです。個人的には、特にグラフィックが全体的にリッチで、ゲームシステム周りも手堅く纏まってるように思えます。また実在のローバーを弄ることで「なるほど、ここはこうなっているのか」と興味を持って仕組みを学ぶことができるのも好印象。
読者の皆様の中に、もし宇宙やエンジニアリングに興味を持っている方がいらっしゃれば、本作は強くお勧めしたい一本ですね。デモ版もあるのでまずはどんなものか実際にプレイしてみるのも良いかもしれません。
対応機種:PC(Steam)
記事におけるプレイ機種:PC(Steam)
発売日:2020年11月13日
記事執筆時の著者プレイ時間:1時間30分
価格:通常価格 1,220円、セール価格 793円(2020年11月20日まで)
オマケ


ぶーぶー言いながらも、このあとちゃんと直しました。



















































